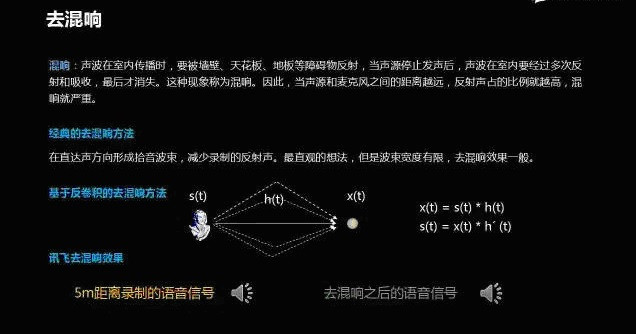
�����ָ�����҃�(n��i)�����r�������Ҫ�����������컨���������ذ���ϵK�ﷴ�����������Դֹͣ�l(f��)�����������҃�(n��i)Ҫ��(j��ng)�^��η�������������������ʧ���@�N�F(xi��n)��Q���������ˣ���Դ�������L֮�g�ľ��xԽ�h�����������ռ�ı�����Խ�����������푾͇���������
��(j��ng)���ȥ��푷��������γ�ʰ��������p�ٷ����ͻ��ڷ����e��ȥ��푷���������
����ָ�h���fԒ�˵���ͨ�^�P�����ų��������䷴�������ֱ����˵������L�ռ��ق��ͻ��h���������W����Ҫ���F(xi��n)�Ĉ��ϰ�����ģ�M�Ԓ����ģʽ������֙C����ģʽ������܇�d�{���Ԓ�Ȉ���������
���ڴ��Ļ��������g�y�c�����Ȳ��ŵ�����һ������w�������ǭh(hu��n)�@���w�����������Ҫ�����Ķ�ͨ�����������g���O������Ⱥ������Lһ����x�ܽ��������ʹ���߾��x�^�h������������L��̖������Ⱥܵͣ�һ����-10dB~-30dB����
��(j��ng)��Ļ��������������Ǿ��Ի�����̎���������ͨ�^�Ǿ��ԵĻ����Ƽ��g�����@�������˷Ǿ�����r�µ�Ч�������
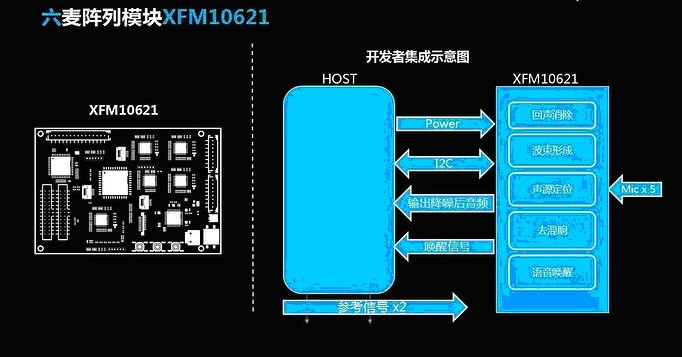
�����L��нY(ji��)��(g��u)�OӋ����
Mic �Ŀ������ԽСԽ����������_��Խ��Խ�ã����ԽСԽ��������M����1:1�����������������c����ֵԽ�������������l푵����cԽ����l����������Ҫ�����c��12KHz������������ҲҪ��8KHz���������������ǻ�w����©��������@����飬�����������������λ���180���������ǻ��©��r�������l(f��)��������������ǵ��l�l�Ρ�
���˺����ȵ�ʧ�涼ҪС����������ʧ��С��4%������ʧ��С��10%��������������ȵ��lʧ�����Щ�������^10%����������Կ��]���ӞV�����V�����l�ɷ��������
����ǻ�w�����c�����C��(g��u)������1mm�ľ��x�������ֹǻ���c�C��(g��u)���|�a(ch��n)���������
���ȹ�Ĥ�Ϸ��c�C��(g��u)������1.5mm�ľ��x����Է���Ĥ��������C��(g��u)���a(ch��n)��������
�����c�C��(g��u)���н��|�ĵط�����Ҫ�������������������_���p���Ч�������ֹ������ӕr�c�C��(g��u)����ײ�a(ch��n)��������
�����L����W�Y(ji��)��(g��u)�_�J����
1.�h�̕��h��F(xi��n)���Y(ji��)��(g��u)�OӋ�u��
�_�J������И�(g��u)�������_�Jǻ�����b�Y(ji��)��(g��u)�OӋ�����_�J�M����ȡ�ֱ����С��������
2.�W��������Ч���u��-��һ�A��
Ӌ�������͎�ǻ�Y(ji��)��(g��u)�������L֮�g�����֮�g�C���̶ȣ�����(j��)�����Y(ji��)���_���Ƿ�ͨ�^�������
3.�W��������Ч���u��-�ڶ��A��
�քe���������͎�ǻ�Y(ji��)��(g��u)�������L��̖��������λ��Դ��λ����������߶�λ�`��С��5�������t�J��ͨ�^ԓ헜yԇ�����
4.�W�����������u��-�����A��
�քe���������͎�ǻ�Y(ji��)��(g��u)�������L�����(sh��)��(j��)�M���R�e��Ч�������2%�ԃ�(n��i)������t�J���h���R�e����o���}�����
��ͬ��е��m�÷���
�����h(hu��n)����У������h(hu��n)������m���ڑ��È����^����s�������̈����k���ң�����������Ƕȶ�λҪ����^�ߣ����������R�e��Ҫ���^�ߵęC���˺ͼҾӮa(ch��n)Ʒ��Q���������
����������У�������������m����܇�d�������{(di��o)�������ҕ���������͙C���˵������b��������֧��0~180��Ƕȶ�λ�����������B�m(x��)���ѵȹ���������
����������У�����������Ќ�оƬ����Ҫ���^�ͣ��m���ڵͳɱ��������b���Q���������֧�ֻ������������Ƶȹ����������
QA����
1.ԭʼ���l�|(zh��)�����}һ�������Щ���
���܌��µ�ԭ����^�࣬�����Դ��늲��㌧�µĵ����^���������^��µ����|(zh��)�½�������ړ���µ�ʰ���}���������g����^�����������憖�}��ɵĽط������������̖���놖�}�ȵ���������w���}��Ҫ���w������
2.�����L���ܛ�˺�ģ�K�ą^(q��)�eһ�������Щ�����
�����L���ܛ����Ҫ������������L�����PӲ��ģ�K�����������ܛ���㷨�켯�ɺ��{(di��o)ԇ��(y��u)�����������L���ģ�K�Ƿ��b�õ�Ӳ��ģ�K����ֱ��ݔ�������L��н��������l����ܛ�˵ĸ���һ����APP��ϵ�y(t��ng)�̼����������������L���ģ�K�ĸ����ɹ̼��������������
3.�ҵĮa(ch��n)Ʒ��ԓ�x��ʲô��(g��u)�͵������L��У�
������͙C����һ�����]���������h(hu��n)�����������錦�Z���R�e��Ҫ��������������h(hu��n)����еIJ�����ʰ�����������m�ˡ��������͙C���˺�һЩ�Ҿ߮a(ch��n)Ʒ���]�����������߃������������L�����������~�R�e���������l���|(zh��)��Ҫ�������^�͡�
4.��������Ч�����ѿ�����ʲôԭ�����
����Ҫ�z�酢����̖�Ƿ��ɹ��ź�����ǰ���룬���Ҫ�z���������͵������ȵĽ�������Ƿ����_������Ҫ�z�������Ƿ����ʧ��Ȇ��}��






 2753247725
2753247725 13729959073
13729959073

